نحوه کنترل دور موتور dc – به روش مُدولاسیون پهنای پالس pwm
در این پروژه می خواهیم با استفاده از میکرو کنترلر ، موتور dc را کنترل و راه اندازی کنیم . اگر به یک موتور dc ماکزیمم ولتاژ تعیین شده را به صورت مستقیم و ثابت اعمال کنیم موتور با حداکثر سرعت شروع به چرخش می کند. از روشهای کنترل و یا کاهش دور موتور می توان به استفاده از مقاومت متغیر با وات بالا و یا به استفاده از منبع تغذیه با ولتاژ متغیر اشاره کرد. اما بدلیل کاهش انرژی و کنترل دقیق موتور dc می توان از مدولاسیون عرض پالس (موج pwm) استفاده کرد در ادامه با نحوه کنترل دور موتور dc با ما همراه باشید.
نحوه کنترل دور موتور dc
یکی از روشهای کنترل دور موتور استفاده از فرکانسهای مختلف در روشن و یا خاموش کردن ترانزیستور سوئیچ راه انداز موتور می باشد. که در این وضعیت با افزایش فرکانس سوئیچ می توان دور حرکتی موتور را کاهش و با کم کردن فرکانس دور موتور را افزایش داد. اما یکی از مشکلات این روش داغ کردن ترانزیستور های سوئیچ در فرکانسهای بالا می باشد. برای حل این مشکل از روش pwm استفاده می شود. در این روش فرکانس ثابت و تنها نسبت یک و صفر (روشن و خاموش شدن ترانزیستور سوئیچ) تغییر می کند. و به آن Duty Cycle می گویند.
تعریف مُدولاسیون پهنای پالس – Duty Cycle
PWM (مُدولاسیون پهنای پالس یا مُدولاسیون عرض پالس) : به تغییرات زمان روشن و خاموش شدن (Duty Cycle) یک موج در یک فرکانس خاص که سبب تغییر مقدار توان در خروجی مدار شود. موج pwm گویند.
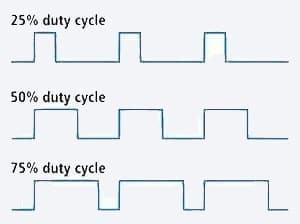
همانطور که در نمودار بالا نشان داده شده فرکانس هر 3 موج با هم برابر است(زمان بالا رفتن هر موج در یک زمان شروع می شود). اما زمان خاموش شدن آنها با هم متفاوت می باشد. که در موج اول 25% زمان هر سیکل روشن و 75% زمان خاموش می باشد. در موج دوم زمان روشن و خاموش با هم برابر می باشد. و در موج سوم 75% زمان سیکل روشن و 25% باقیمانده خاموش می باشد. با این حال توان منتقل شده در موج اول از همه کمتر و در موج سوم از همه بیشتر می باشد.
چگونه می توان مُدولاسیون عرض پالس را تولید کرد؟
تولید موج pwm بسیار ساده می باشد.
فقط کافیست با مفهوم Duty Cycle آشنا شویم .
و بدانیم که هر فرکانسی از تعدادی نوسان در ثانیه تشکیل شده است .
برای مثال در برق شهری فرکانس برق 50 هرتز می باشد. یعنی در هر ثانیه 50 دوره تناوب شکل می گیرد. ولتاژ مستقیم بر خلاف متناوب دوره تناوب ندارد . اما می توان با استفاده از مدارات نوسان ساز انواع فرکانسها را تولید کرد. در این مدارات ما دو سطح ولتاژ داریم یکی ولتاژ مثبت و دیگری ولتاژ صفر ولت می باشد . در صورتی که زمان قطع و وصل هر سیکل با هم برابر باشد . می گوییم Duty Cycle این موج 50% می باشد. حال اگر ما مقدار یکی از این دو وضعیت را کمتر و یا بیشتر کنیم به شرط آنکه فرکانس تغییر نکند جریان و توان به همان مقدار بیشتر و یا کمتر می شود. به این عمل تولید موج pwm می گویند.
مدارهایی که می توان با آنها بصورت دیجیتال دور موتور dc را کنترل کرد.
- استفاده از مدار H که از اتصال چهار ترانزیستور تشکل شده
- استفاده از مدار تقویت شده H
- استفاده از درایور و آی سی آماده L293D
- استفاده از درایور و آی سی آماده L298N
- و …
در مقالات بعدی به مدارات مربوطه خواهیم پرداخت.
مطالب پیشنهادی :